
摘要:本文探讨了马斯克提出的纯视觉方案与激光雷达方案之间的对比,以及这两种方案对算力要求和门槛的博弈。纯视觉方案依赖于强大的算法和计算能力,以实现高精度的自动驾驶,而激光雷达方案则通过激光雷达技术提供更为准确的感知能力。随着技术的发展和算力的提升,这两种方案的门槛逐渐降低,但算力要求仍然是一个挑战。马斯克对于自动驾驶技术的探索和发展具有重要意义,对于未来智能交通的发展具有重要影响。
随着自动驾驶技术的飞速发展,马斯克的纯视觉方案和激光雷达方案备受关注,本文将从算力要求、技术门槛以及未来发展趋势三个方面,深入探讨这两种方案的优劣,并探究未来是否有可能将两者融合。
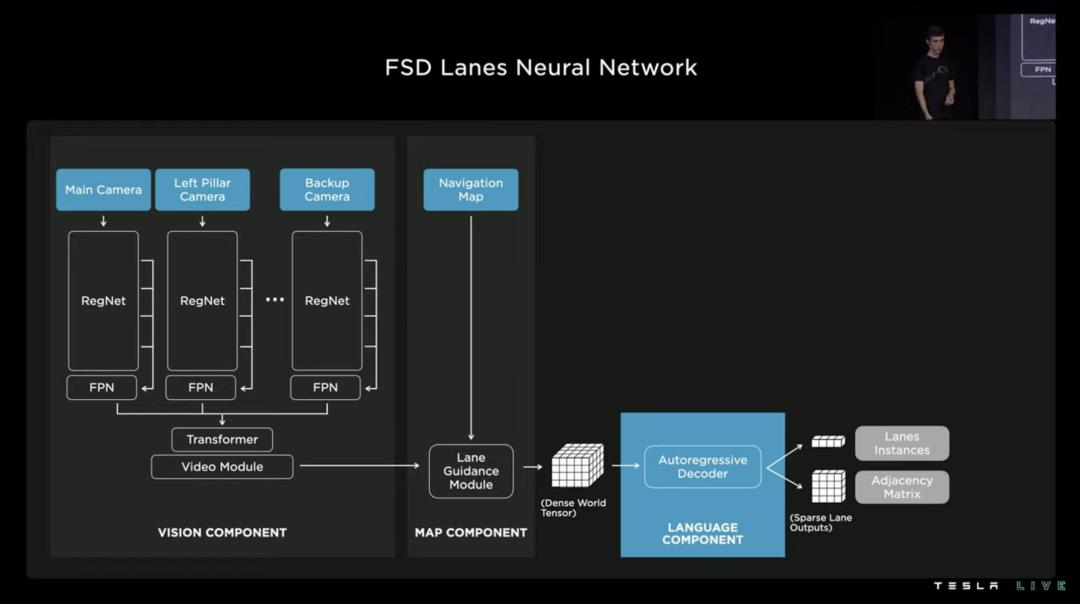
马斯克的纯视觉方案:算力要求高、门槛高
(一)算力要求

马斯克的纯视觉方案主要依赖于高性能的神经网络和算法,对算力的需求极高,为了处理海量的图像数据并实现高精度的自动驾驶,需要强大的计算平台来满足实时处理图像信息的需求。
(二)门槛高
纯视觉方案的门槛相对较高,主要体现在技术积累、数据集和算法优化等方面。
纯视觉方案需要深厚的技术积累,包括计算机视觉、深度学习等领域的知识,为了训练出高效的神经网络,需要大量的标注数据,数据集的获取和标注需要大量的人力物力投入,纯视觉方案需要不断优化算法,以适应各种复杂的交通场景。
激光雷达方案:暂时成本稍高但门槛低
(一)成本稍高
相较于纯视觉方案,激光雷达方案的初始成本相对较高,但随着技术的不断发展,激光雷达的成本正在逐步降低。
(二)门槛低
激光雷达方案的门槛相对较低,主要体现在技术要求、数据处理和广泛应用等方面,虽然激光雷达方案也需要一定的技术支持,但相对于纯视觉方案来说,其技术门槛较低,激光雷达能够直接提供环境的三维信息,数据处理相对简单,激光雷达方案可以应用于多种场景,如自动驾驶、机器人导航等。

未来终极会不会是合二为一?
关于未来自动驾驶技术的发展方向,是否会将纯视觉方案和激光雷达方案合二为一,这是一个值得探讨的问题,从技术融合、成本和市场需求三个方面进行思考,未来有可能实现两者的融合。
随着技术的不断发展,纯视觉方案和激光雷达方案有可能会实现技术融合,利用激光雷达提供的环境三维信息,可以辅助纯视觉方案进行更准确的图像识别和处理,随着技术的进步和批量生产,激光雷达的成本有望进一步降低,使得其在自动驾驶领域的普及成为可能,如果市场对自动驾驶技术的需求越来越高,且对性能要求越来越严格,那么将纯视觉方案和激光雷达方案进行融合的可能性将增大。
马斯克的纯视觉方案和激光雷达方案各有优劣,未来是否将两者融合,还需根据技术进展、市场需求等多方面因素进行综合考虑,无论如何,我们都应关注这一领域的最新动态,共同探索自动驾驶技术的发展道路。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号